Grafy a grafové algoritmy
![]() Note
Note
Reprezentace grafů. Souvislost grafu, rovinné grafy. Prohledávání grafu do šířky a do hloubky, nejkratší vzdálenosti, kostry, toky v sítích. Algoritmy: Bellman-Ford, Dijkstra, Ford-Fulkerson, Push-Relabel, maximální párování v bipartitních grafech.
> IB000, IB002, IV003
![]() Tip
Tip
Tahle otázka má solidní překryv s bakalářskými otázkami Grafy a Grafové problémy.
Terminologie
Section titled “Terminologie”-
Graf
Dvojice kde:- je množina vrcholů; ,
- je množina hran; ,
- hrana je dvojice vrcholů .
-
Váha grafu
Váha grafu je součet vah hran grafu . -
Bipartitní graf
Graf jehož vrcholy lze rozdělit do dvou disjunktních množin tak, že všechny hrany vedou z jedné množiny do druhé.Example of bipartite graph without cycles by Watchduck

-
(Silná) souvislost grafu / (strongly) connected graph
Graf je souvislý, pokud pro každé dva vrcholy existuje cesta z do . -
Slabá souvislost grafu / weakly connected graph
Graf je slabě souvislý, pokud je souvislý jeho podgraf vzniklý odebráním orientace hran.Je souvislý alespoň, pokud zapomeneme, že hrany mají směr?
-
Silně souvislá komponenta / strongly connected component
Silně souvislá komponenta grafu je jeho maximální podgraf takový, že je silně souvislý. Jinými slovy pro každé dva vrcholy existuje cesta z do . -
Planární / rovinný graf
Graf je planární, pokud se dá nakreslit do roviny tak, že se žádné dvě hrany nekříží.Platí v nich Eulerova formule:
Kde je počet stěn — oblastí ohraničených hranami.
Vrcholy planárního grafu lze vždy obarvit 4 barvami tak, že žádné dva sousední vrcholy nebudou mít stejnou barvu.
-
(Hranový) řez / (edge) cut
Množina hran taková, že po odebrání hran se graf rozpadne na více komponent — není souvislý.Analogicky se definuje i vrcholový řez / vertex cut.
Reprezentace grafů
Section titled “Reprezentace grafů”-
Seznam následníků / adjacency list
Pro každý vrchol máme seznam (např. dynamic array nebo linked list) jeho následníků.Zabírá paměti.
-
Matice sousednosti / adjacency matrix
Máme matici velikosti kde pokud existuje hrana mezi a , jinak .Dá se pěkně použít k uložení vah.
-
Matice incidence / incidence matrix
Máme matici velikosti kde pokud je vrcholem hrany , jinak .Dá se z ní pěkně určit stupeň vrcholu.
Prohledávání grafu
Section titled “Prohledávání grafu”Prohlédávání do šířky / breadth-first search (BFS)
Section titled “Prohlédávání do šířky / breadth-first search (BFS)”Od zadaného vrcholu navštíví nejprve vrcholy vzdálené 1 hranou, poté vrcholy vzdálené 2 hranami, atd.
- Prohledávání po “vrstvách”.
- Je implementovaný pomocí fronty (queue / FIFO).
- Časová složitost je .
def dfs(graph: List[List[bool]], stamps: List[int], vertex: int) -> None: if stamps[vertex] == -1: stamps[vertex] = 0 stamp = stamps[vertex] for i in range(0, len(graph)): if graph[vertex][i] and stamps[i] != -1: stamps[i] = stamp + 1 dfs(graph, stamps, i)Prohlédávání do hloubky / depth-first search (DFS)
Section titled “Prohlédávání do hloubky / depth-first search (DFS)”Od zadaného vrcholu rekurzivně navštěvuje jeho nenavštívené následníky.
- Prohledání po “slepých uličkách”.
- Vynořuje se teprve ve chvíli, kdy nemá kam dál (backtrackuje).
- Je implementovaný pomocí zásobníku (stack / LIFO).
- Časová složitost je .
def bfs(graph: List[List[bool]], stamps: List[int], vertex: int) -> None: stamp = 0 queue = deque() queue.append(vertex) while len(queue) > 0: current = queue.popleft() stamps[current] = stamp stamp += 1 for i in range(0, len(graph)): if graph[current][i] and stamps[i] == -1: queue.append(i)Nejkratší vzdálenosti
Section titled “Nejkratší vzdálenosti”Problém nalezení buď nejkratší cesty mezi dvěma vrcholy nebo nejkratší cesty z jednoho vrcholu do všech ostatních.
- Relaxace hrany
Zkrácení vzdálenosti k vrcholu průchodem přes vrchol . Musí platit . Hrana je v takovém případě napjatá.
Bellman-Fordův algoritmus
Section titled “Bellman-Fordův algoritmus”Hledá nejkratší cesty z jednoho vrcholu do všech ostatních.
- Využívá relaxaci hran.
- Funguje i na grafech se zápornými hranami.
- Má časovou složitost .
- Udělá max iterací, protože nejdelší cesta může mít max hran (přes žádný vertex nepůjdeš dvakrát).
- Modifikace: Po by už nejkratší cesty měly být nalezeny. Udělejme ještě jednu iteraci - pokud se hodnoty změní, pak nejkratší cesta obsahuje negativní cyklus. Viz python kód dole.
- Modifikace: Early stop - pokud se 2 interace po sobě hodnoty vrcholů nezmění, pak jsme našli nejkratší cesty.
def bellmanford(graph: List[List[Tuple[int, int]]], s: int) \ -> Tuple[bool, List[int], List[int]]: # graph is an adjacency list of tuples (dst, weight) distance = [float('inf') for i in range(0, len(graph))] distance[s] = 0 parent = [-1 for i in range(0, len(graph))]
# relax all edges |V| - 1 times for _ in range(1, len(graph)): for u in range(0, len(graph)): for edge in graph[u]: (v, w) = edge if distance[u] + w < distance[v]: distance[v] = distance[u] + w parent[v] = u
# check for negative cycles for u in range(0, len(graph)): for edge in graph[u]: (v, w) = edge if distance[u] + w < distance[v]: return (False, None, None)
return (True, distance, parent)Dijkstrův algoritmus
Section titled “Dijkstrův algoritmus”Hledá nejkratší cesty z jednoho vrcholu do všech ostatních.
- Je podobný BFS, ale používá prioritní frontu.
- Funguje pouze na grafech bez záporných hran.
![]() Tip
Tip
Složitost závisí na implementaci prioritní fronty. Je to insertů, hledání nejmenšího prvku, snížení priority.
![]() Note
Note
Implementace níže používá pole (resp. Pythoní list), tedy složitost je , jelikož hledání minima je lineární.
def dijkstra(graph: List[List[Tuple[int, int]]], s: int) \ -> Tuple[List[int], List[int]]: # graph is an adjacency list of tuples (dst, weight) distance = [float('inf') for i in range(0, len(graph))] distance[s] = 0 parent = [-1 for i in range(0, len(graph))]
queue = list(range(0, len(graph))) while len(queue) > 0: u = min(queue, lambda v: distance[v]) queue.remove(u) for edge in graph[current]: (v, w) = edge if distance[u] + w < distance[v]: distance[v] = distance[u] + w parent[v] = u return (distance, parent)V binární haldě by to bylo a ve Fibonacciho haldě .
Dijkstrův algoritmus lze optimalizovat, pokud nás zajímá jen nejkratší cesta mezi dvěma konkrétními vrcholy:
-
Funkce vrátí výsledek, jakmile je cílový vrchol vytažen z fronty.
-
Můžeme hledat zároveň ze začátku a konce pomocí dvou front a skončit, jakmile se někde potkají.
-
Můžeme přidat potenciál — dodatečnou heuristickou váhu.
 Important
ImportantTéhle variantě se říká A* (A star). Věnuje se mu část otázky Umělá inteligence v počítačových hrách.
Kostry
Section titled “Kostry”-
Spanning tree / kostra
Kostra grafu je podgraf takový, že je je strom.
-
Minimum spanning tree (MST) / minimální kostra
Je kostra grafu s nejmenší možnou váhou. Tedy pro každou kostru grafu : -
Fundamental cycle
Fundamental cycle je cyklus v grafu takový, že odebráním libovolné hrany získáme kostru. -
Fundamental cutset / řez
Fundamental cutset je množina hran v grafu taková, že přidáním libovolné hrany získáme kostru. -
Red rule
Najdi cyklus bez červených hran, vyber v něm neobarvenou hranu s nejvyšší cenou a obarvi ji červeně. Červená hrana znamená odebrání z finální kostry. -
Blue rule
Najdi řez bez modrých hran, vyber v něm neobarvenou hranu s nejmenší cenou a obarvi ji modře. Modrá hrana znamená přidání do finální kostry. -
Greedy algoritmus
Nedeterministicky aplikuj red rule a blue rule, dokud to jde (stačí iterací). Modré hrany tvoří MST. -
Jarníkův / Primův algoritmus
Speciální případ greedy algoritmu, kdy aplikujeme pouze blue rule. Princip:- Vyber libovolný vrchol a přidej ho do kostry .
- Opakuj krát:
- Vyber hranu s nejmenší cenou, která má právě jeden vrchol v .
- Přidej druhý vrchol do .
Složitost: použijeme binární haldu
- Inicializace ( jako cena hrany mezi prázdnou kostrou a každým vrcholem):
- Odstranění minima z binární haldy pro každý vrchol ve :
- Procházení každé hrany z a snižování ceny:
- Celková složitost:
- S Fibonacciho haldou jde zlepšit na:
-
Kruskalův algoritmus
Princip: Seřaď hrany podle ceny vzestupně. Postupně přidávej hrany do kostry, vynechej ty, které by vytvořily cyklus.- Seřad hrany podle ceny vzestupně.
- Použij union-find na udržování komponent grafu.
- Procházej hrany postupně. Pokud oba konce hrany patří do různých množin, přidej ji.
Je to speciální případ greedy algoritmu.
Složitost:
- Inicializace union-findu:
- Seřazení hran:
- Pro každou hranu provádíme dvakrát
find() a eventuálněunion(): - Celková složitost:
-
Borůvkův algoritmus
Je “paralelní”. Buduje modré stromy ze všech vrcholů naráz.- Pro každý vrchol inicializuj modrý strom.
- Dokud nemáš jen jeden modrý strom, opakuj fázi:
- Pro každý modrý strom najdi nejlevnější odchozí hranu a přidej ji (propojíš tak dva stromy).
Je to speciální případ greedy algoritmu, který spamuje jen blue rule.
Složitost:
- Počet komponent v první fázi: .
- V každé fázi se zmenší počet komponent na polovin. Tím pádem bude fází.
- Každá fáze zabere času, protože procházíme všechny hrany.
- Celková složitost:
 Tip
TipKruskal sice taky buduje stromy na více místech najednou, ale není “paralelní”, protože minimalita kostry spoléhá na to, že hrany jsou seřazené. Borůvka takový požadavek nemá, a proto je paralelizovatelnější.
Složitosti algoritmů
| Algoritmus | Časová složitost | Prostorová složitost |
|---|---|---|
| Jarník (Prim) s prioritní frontou | ||
| Jarník (Prim) s Fibonacciho haldou | ||
| Kruskal | ||
| Borůvka |
Toky v sítích
Section titled “Toky v sítích”-
Síť toků / flow network
Je čtveřice , kde:- je orientovaný graf,
- je zdroj / source,
- je cíl / stok / sink; ,
- je funkce udávající kapacitu hran.
-
Network flow / tok
Je funkce , která splňuje:- podmínku kapacity:
- tok hranou je nezáporný a nepřevyšuje povolenou kapacitu
- podmínku kontinuity:
- tok do vrcholu je stejný jako tok z vrcholu
- podmínku kapacity:
-
Hodnota toku
Ford-Fulkerson
Section titled “Ford-Fulkerson”-
Residual network
Síť, která vzniká, když je už část kapacity hrany využívána tokem . Umožnuje algoritmům změnit přechozí rozhodnutí a získat využitou kapacitu zpět.Je to pětice , kde
- ,
- pokud , ,
-
Augmenting path
Jednoduchá cesta v residuální síti . Cesty hledáš buď BFS nebo DFS - každou iteraci si prostě nějakou vybereš. Note
NoteT.j. cesta která může jít i proti směru toku .
Bottleneck kapacita je nejmenší kapacita hran v augmenting path .
To krásné na augmenting cestách je, že pro flow a augmenting path v grafu , existuje tok takový, že . Nový tok lze získat takto:
*Augment*(f, c, P){delta = bottleneck(P)*foreach*(e in P){*if*(e in E){f[e] = f[e] + delta}*else*{f[reverse(e)] = f[reverse(e)] - delta}}*return* f} -
Algoritmus Ford-Fulkerson
Hledá maximální tok. Augmentuje cestu v residuální síti dokud to jde.- pro každou .
- Najdi cestu v reziduální síti .
- Augmentuj tok podél .
- Opakuj dokud se nezasekneš.
*Ford-Fulkerson*(G){*foreach* (e in E){f(e) = 0}G_f = reziduální síť vzniklá z G vzhledem k toku f*while* (existuje s ~> t cesta v G_f){f = Augment(f, c, P)Updatuj G_f}*return* f}
Push-Relabel
Section titled “Push-Relabel”-
Pre-flow
Ne-tak-docela tok.Funkce taková, že
- platí kapacitní podmínka: ,
- platí relaxováné zachování toku:
-
Overflowing vertex
Takový vertex , do kterého více přitéká než odtéká. -
Excess flow
To, co je v overflowing vertexu navíc. -
Height function
Funkce . Řekneme, že je kompatibilní s preflow , právě když-
source: ,
-
sink: ,
-
height difference: .
NotePokud mezi dvěma vrcholy v reziduální síti vede hrana, pak je nejvýše o jednu úroveň výš než .
-
-
Push operace
Pro (reziduálně-grafovou) hranu se pokusí přesunout excess flow z do , aniž by porušil (reziduální) kapacitu .// Assumptions: e_f[v] > 0, c_f( (v, w) > 0) > 0, h[v] > h[w]*Push*(f, h, v, w){delta_f = min(e_f[v], c_f(v, w))*if*( (v, w) in E)f[(v, w)] += delta_f*else*f[(w, v)] -= delta_fe_f[v] -= delta_fe_f[w] += delta_f} -
Relabel operace
Zvýší výšku natolik, aby neporušil kompatibilitu s .// Assumptions:// - v is overflowing: e_f[v] > 0// - all residual neighbors of v the same height or higher:// forall (v, w) in E_f: h[v] \<= h[w]*Relabel*(f, h, v){h[v] = 1 + min(h[w] | (v, w) in E_f)} -
Algoritmus Push-Relabel (Goldberg-Tarjan)
Hledá maximální tok.Princip: Pokud je nějaký vrchol overflowing, tak ho pushni nebo relabeluj. Pokud ne, tak jsi našel maximální tok.
*Push-Relabel*(V, E, s, t, c){// initialize preflow -- default values*for*(v in V){h[v] = 0 // height functione_f[v] = 0 // excess flow}n = |V|h[s] = n*for*(e in E){f[e] = 0 // (pre)flow}// initialize preflow -- saturate connections from s*for*( (s, v) in E){f[(s, v)] = c(s, v) // preflow maxes out all capacitye_f[v] = c(s, v) // presume all of it excesse_f[s] -= c(s, v) // yes, it will be negative}// the juicy part*while*(_any vertex is overflowing_){v = _an overflowing vertex_ (has e_f[v] > 0)*if*(v _has a neighbor_ w _in_ G_f _such that_ h(v) > h(w)){*Push*(f, h, v, w)}else{*Relabel*(f, h, v)}}*return* f}Korektnost: V průběhu výpočtu platí:
- Výška vrcholu nikdy neklesá.
- Pre-flow a výšková funkce jsou kompatibilní.
Složitost:
- Nejvýše Relabelů.
- saturujících Push.
- nesaturujících Push.
- Relabel i Push jsou v .
- Celkem: .
Srovnání algoritmů Ford-Fulkerson a Push-Relabel
| Ford-Fulkerson | Push-Relabel (Goldberg) |
|---|---|
| global character | local character |
| update flow along an augmenting path | update flow on edges |
| flow conservation | preflow |
Maximální párování v bipartitních grafech
Section titled “Maximální párování v bipartitních grafech”-
Párování / matching
Množina taková, že žádné dvě hrany v nemají společný vrchol. 1Prázdná množina je párováním na každém grafu. Graf bez hran má pouze prázdné párování.
Příklad párování, které je zároveň maximální by RRPPGG
-
Maximální párování
Takové párování, které má nejvyšší počet hran. Graf může mít několik maximálních párování. -
Perfektní párování
Takové párování, které páruje všechny vrcholy grafu. Každé perfektní párování je zároveň maximální. -
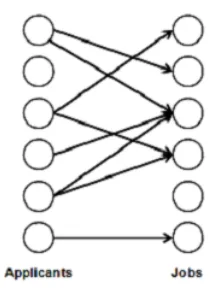
Maximum cardinality matching (MCM) v bipartitním grafu
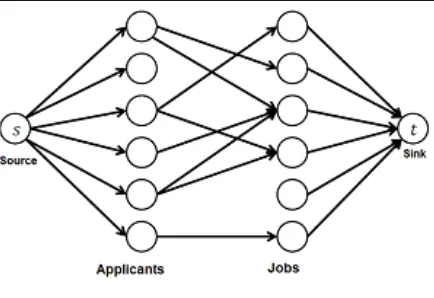
Problém nalezení maximálního párování v grafu. Ve speciálním případě, kdy graf je bipartitní, se tento problém dá převést na problém nalezení maximálního toku v síti: 2-
Mejmě bipartitní graf .
-
Přidej zdroj a hranu pro každý vrchol z .
-
Přidej stok a ranu pro každý vrchol z .
-
Každé hraně dej kapacitu 1.
-
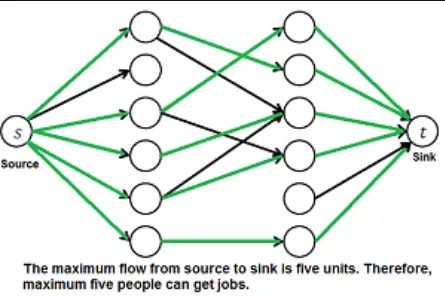
Spusť algoritmus Ford-Fulkerson.
-